Making complex surface grinding easy

The project “GrindBot” is carried out within the framework of the European funding program “Eurostars” and the German partners are funded by the Federal Ministry of Education and Research with the project no. E!115077 / 01QE2130B.
Details
Grinding is a labor-intensive process that is required in many different industries, ranging from the automotive to the naval and aerospace industry. It is also used for technologies such as wind-power. Grinding in these cases is needed to manufacture complex parts with significant curvatures where a lot of material has to be removed and geometric tolerances are strict. Therefore, grinding of such complex geometries is currently still performed manually which is tiring for laborers and expensive for employers. The project GrindBot is developing an innovative robotic solution to automate the surface finishing of complex metal parts to make grinding easier, more affordable, and thus avoiding the outsourcing of production to low wage countries. Outsourcing can be avoided if grinding and the use of robots in production become more efficient.
The adaptation of robots into regular production has recently taken a leap since the cost of installing robots has fallen significantly. But the cost of robots is only one part of the challenge of developing GrindBot. The other part of the challenge are technical aspects. Grinding is an equally relevant and complex process: Parts from operations such as casting, welding or additive manufacturing are regularly ground with abrasive tools to clear imperfections and provide regular surfaces. Currently, these long hours of grinding are still mostly done by hand. Complex parts might require several hours of grinding. The duration influences the condition of the abrasive tool itself by often resulting in uneven material removal on the surface. The uneven material removal rate causes further problems, concerning the geometry of the workpiece. Due to the general need for grinding and the problems related to its duration, grinding robots other than GrindBot have been brought to the market. ModuleWorks already participated in two projects to address this gap, TruboEras which is a robot cabinet to grind casted turbine blade profiles and ArGrind, a predecessor of the currently developed GrindBot. Building on the results of ArGrind, the project GrindBot investigates research gaps on the efficiency and precision of grinding robots. GrindBot is supposed to be an economically efficient and technically accurate robotic solution which is useful for industrial application and insightful for research on automatization.
The challenge of developing GrindBot is to implement a real-time material removal rate which makes the robot go fast when the abrasives are new and then progressively reduces the robot feed as tool wear increases. For GrindBot, the automation process is meant to guarantee a qualitatively high product with minimum human intervention. This requires the development of a process manager for the robotic cell on which the machine operator can define the production process by choosing abrasive tools to be used as well as select the trajectory programs created by the companion software. The desired process is then executed by GrindBot without any further involvement of the machine operator. To ensure the quality of the product and the validity of the process itself, the grinding process is previously checked by an accurate simulation of the ground surface. This eliminates phases of trial and error by optimizing the robot trajectory and process conditions beforehand. These phases of trial and error would also be harmful for the environment due to material waste. They are moreover tiring for the laborer due to the duration and intensity of manual grinding. Simulation in this case is therefore a useful and important tool to avoid negative effects of production. This is enhanced by the implementation of an innovative robot trajectory optimization feature which creates a loop between the simulation and the non-ground areas to modify the trajectory in real-time, not before, but while the process takes place.
GrindBot is ideally suited for companies that produce complex parts which up until now require long trial and error periods to define the accurate tool path of the grinding process. Additionally, GrindBot targets companies that put a high priority on not damaging parts due to the high value added. The project also addresses companies that have small production batches or that change the produced parts frequently. To guarantee the accessibility for both larger and smaller companies in different industries, an intuitive interface using point and click is designed to address non-expert users. On the other hand, a CAM-integrated plug-in is provided for users with the corresponding CAM proficiency. The unique role of ModuleWorks in the project is to provide modules of the input and output specification and to simulate the ground surface as well as the robot trajectory. With these innovative components ModuleWorks and its partners hope to provide a robotic solution that meets the requirements of the complex grinding process with a sophisticated CAM solution to make surface grinding easy.
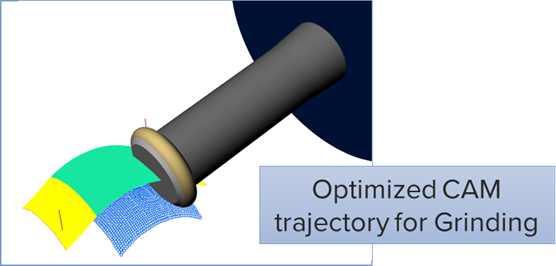
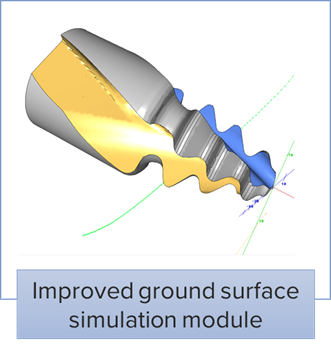
The pictures above illustrate two contributions of ModuleWorks to the project, the optimized trajectory (right) and the improved surface simulation module (left). Both contributions simplify the grinding of complex surfaces.